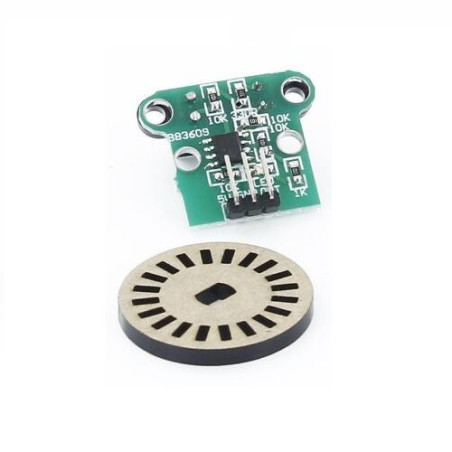

Al interrumpirse el rayo de luz el voltaje de salida lógico cambia a 0 lógico, y cuando el rayo pasa con normalidad el módulo arroja una salida de 1 lógico.
Conextando el encoder al eje de un motor se puede medir su comportamiento, posición o velocidad.
Voltaje de alimentación: 3.3 a 12 V
Chip principal: LM393
Salida efectiva: Nivel bajo
LED indicador de funcionamiento
Forma de salida: Conmutación digital (0 y 1)
Frecuencia de medición: 100 KHz
Cuenta y detecta la velocidad de un motor
Número de pines: 4
Dimensiones: 31 mm X 14.5 mm
Su agradecimiento a la reseña no pudo ser enviado
Reportar comentario
Reporte enviado
Su reporte no pudo ser enviado
Escribe tu opinión
Reseña enviada
Su reseña no pudo ser enviada
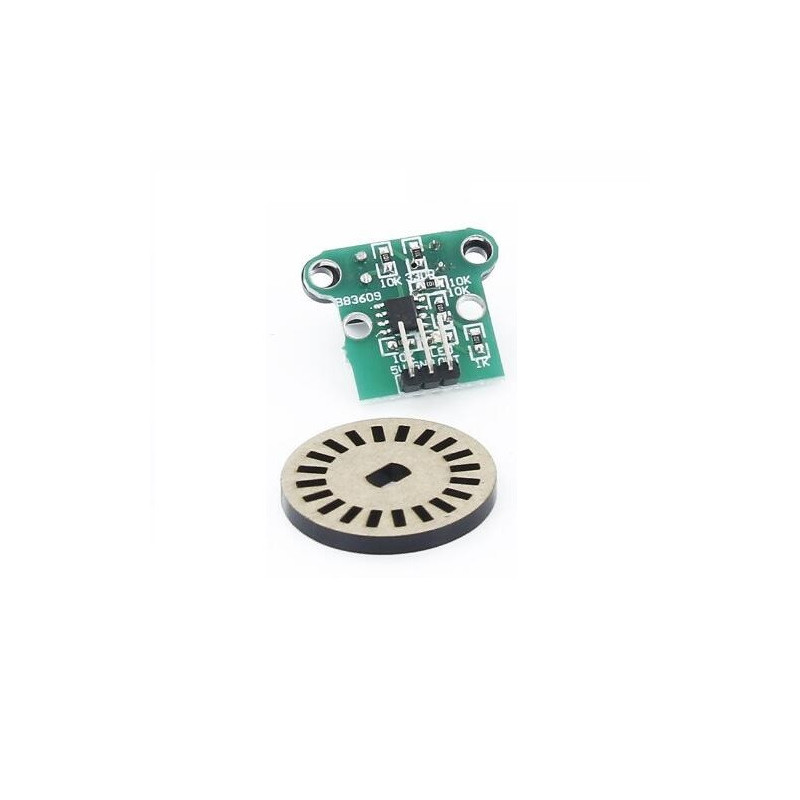
Al interrumpirse el rayo de luz el voltaje de salida lógico cambia a 0 lógico, y cuando el rayo pasa con normalidad el módulo arroja una salida de 1 lógico.
Conextando el encoder al eje de un motor se puede medir su comportamiento, posición o velocidad.
Voltaje de alimentación: 3.3 a 12 V
Chip principal: LM393
Salida efectiva: Nivel bajo
LED indicador de funcionamiento
Forma de salida: Conmutación digital (0 y 1)
Frecuencia de medición: 100 KHz
Cuenta y detecta la velocidad de un motor
Número de pines: 4
Dimensiones: 31 mm X 14.5 mm